VIRTUALIZATION
FOUNDATIONS
The execution mechanics every upstream control plane inherits.
MATURITY STAGE POSITION
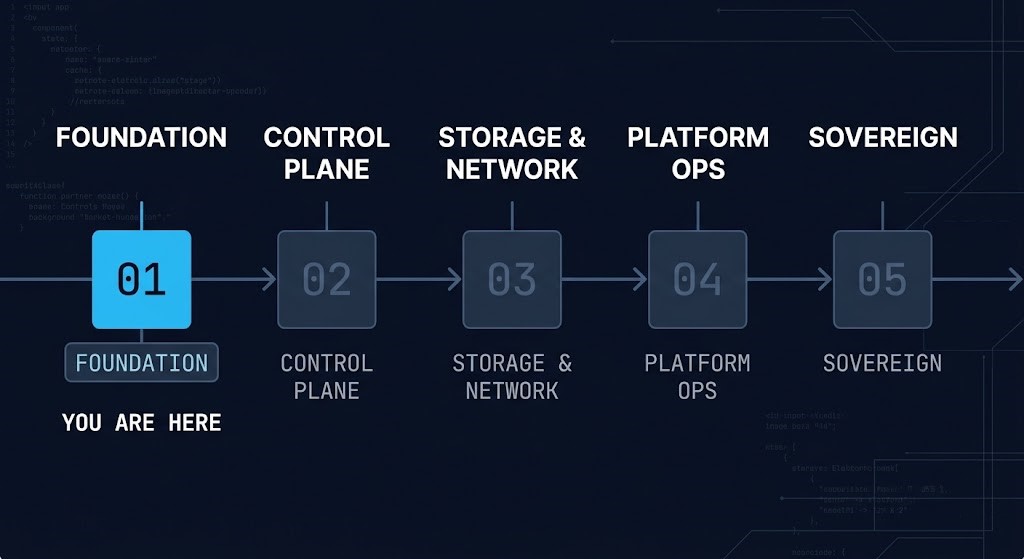
- Current Stage: Foundation — Maturity Stage 01 of 05
- Primary Architectural Concern: Establishing deterministic vocabulary for compute abstraction, scheduling behavior, and failure-domain boundaries
- Primary Failure Mode: Treating the hypervisor as commodity infrastructure stops architectural reasoning at exactly the layer where execution physics, scheduling behavior, and failure domain boundaries are established
- Stage Outcome: Architects completing this stage should be able to reason about abstraction boundaries, scheduling behavior, and virtualization failure domains before platform selection enters the conversation
- Next Stage: Operational — Control Plane Architecture
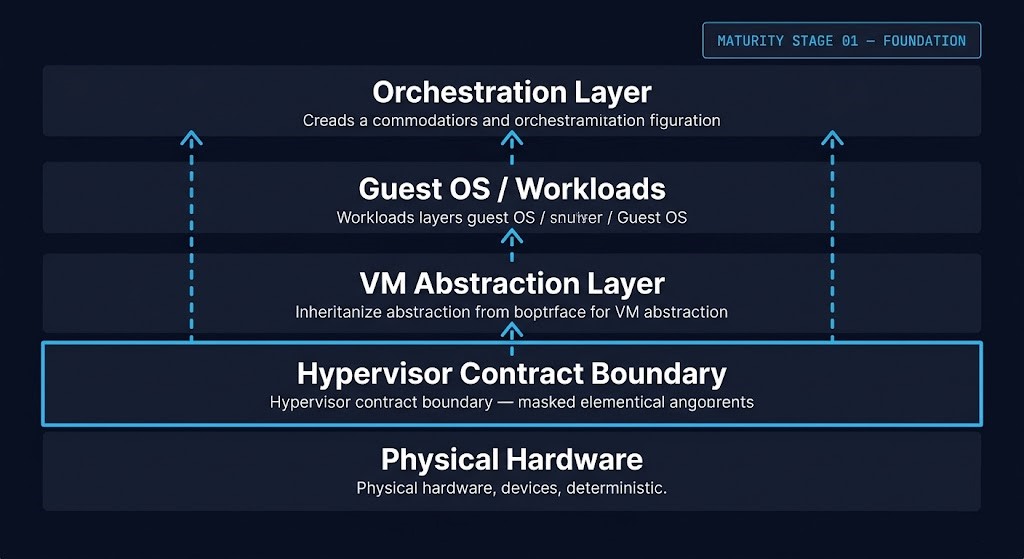
Virtualization foundations are not beginner content. The hypervisor is not just an isolation layer — it is a contract boundary between hardware behavior and orchestration behavior. Every scheduling decision, memory locality assumption, and failure-domain boundary that exists above this layer was defined here first. Teams that treat this layer as solved infrastructure stop reasoning about it at exactly the point where architectural precision matters most.
Virtualization did not disappear when cloud-native infrastructure emerged. Kubernetes, cloud schedulers, and modern orchestration systems don’t replace the virtualization layer — they inherit its assumptions. What was decided at the hypervisor layer is still being paid for at the platform layer: in latency anomalies that appear at the Kubernetes scheduler, in HA failures that turn out to be application-recovery failures, in contention events that were invisible until the workload hit production. Teams that skip this layer often discover later that their architecture decisions were built on vocabulary they never fully defined.
WHY THIS STAGE EXISTS
Most operational failures blamed on platforms, tooling, or vendors originate much lower in the stack — at the abstraction and scheduling layer architects stopped thinking about years ago.
The goal of the Foundation stage is not to teach virtualization basics. It is to restore architectural precision around the mechanics every upstream control plane inherits: scheduling behavior, memory locality, abstraction boundaries, and failure-domain definition. That precision is what separates architects who can reason about a platform problem from architects who can only describe its symptoms.
WHAT THIS STAGE IS NOT
01 — NOT A HYPERVISOR PRODUCT COMPARISON
VMware vs Nutanix vs KVM vs Hyper-V comparisons belong in the Operational and Sovereign stages. Foundation establishes the mechanics that make any platform comparison meaningful — without it, product comparisons are marketing exercises.
02 — NOT A VMWARE TUTORIAL OR VSPHERE CONFIGURATION GUIDE
This stage is not a product walkthrough. Configuration specifics live in the Virtualization Architecture pillar pages. Foundation covers the architectural principles that apply regardless of which platform is running them.
03 — NOT A MIGRATION PLANNING RESOURCE
Migration strategy, platform exit decisions, and post-VMware architecture belong to the Sovereign stage. Foundation gives you the vocabulary to reason about what you’re migrating from and to — not the migration plan itself.
04 — NOT CERTIFICATION PREP
No exam objectives. No flashcard sequences. No vendor certification alignment. The content here is organized around architectural tradeoffs and operational consequences — not test domains.
>_ READING DEPTH
FOUNDATION STAGE — READING SCOPE
| Stage | Articles | Estimated Depth | Primary Concern |
|---|---|---|---|
| Foundation (this stage) | 6 articles | 3–4 hours | Abstraction mechanics, scheduling physics, failure-domain vocabulary |
| Operational — Control Plane Architecture | 8 articles | 3–4 hours | Cluster coordination, scheduling authority, lifecycle governance |
| Strategic — Deterministic Platform Operations | Coming soon | — | Governance, cost modeling, operational determinism |
| Sovereign — Post-VMware Strategic Architecture | Coming soon | — | Platform independence, migration authority, exit strategy |
>_ WHERE TO ENTER THIS STAGE
Start here if you are building architecture vocabulary from first principles — if your understanding of virtualization is primarily operational (how to configure it) rather than architectural (what it decides and what those decisions cost).
You can likely skip ahead to the Operational stage if:
- You already reason about NUMA locality during workload design
- You understand how scheduling behavior changes under contention — not just what the utilization metrics show, but what the scheduler is actually deciding
- You can explain how the virtualization layer defines the failure-domain boundaries that HA and DR designs inherit
If those three statements describe you, the Operational stage is the correct entry point. If any of them require translation, start here.
>_ ARCHITECTURE MATURITY POSITION
| Stage | Level | Focus | Slug |
|---|---|---|---|
| 01 — Foundations ← YOU ARE HERE | Foundation | Abstraction mechanics, scheduling physics, failure-domain vocabulary, control plane inheritance | /virtualization-foundations/ |
| 02 — Control Plane Architecture | Operational | Hypervisor control planes, HA design, cluster authority boundaries | /virtualization-control-plane-architecture/ |
| 03 — Storage & Network Integration | Operational | Storage fabric, network virtualization, I/O path architecture | /virtualization-storage-and-network-architecture/ |
| 04 — Deterministic Platform Operations | Strategic | Day-2 governance, cost architecture, operational determinism | /virtualization-deterministic-operations/ |
| 05 — Post-VMware Strategic Architecture | Sovereign | Platform independence, migration authority, exit strategy | /virtualization-sovereign-architecture/ |
>_ READING SEQUENCE
The five cards below are dependency-ordered, not topic-ordered. Each card builds the conceptual foundation the next one requires. Card 5 is the bridge — it closes the Foundation stage by making explicit why the mechanics you just read matter to every control plane decision above this layer.
Abstraction & Isolation Mechanics
Why virtualization exists. What abstraction costs. What the hypervisor exposes upward to orchestration layers and what it intentionally hides. This is the entry point — the card that defines the vocabulary everything else in this stage builds on.
Scheduling & Resource Arbitration
CPU scheduling models. Memory pressure behavior. NUMA locality and its effect on workload performance. Overcommit physics — what overcommit looks like under normal load versus under contention. The scheduler does not behave the same way in both conditions, and the architecture must account for the contention case, not the idle case.
Note: Additional hypervisor-specific scheduling article to be added when published.
Failure Domains & Determinism
Cluster boundaries. HA assumptions and what HA actually guarantees versus what most teams assume it guarantees. Blast radius definition. How failure domains defined at the virtualization layer are inherited by every recovery architecture built above it. The failure-domain vocabulary established here is the foundation the Resilient and Sovereign stages build on.
FOUNDATION-LEVEL FAILURE PATTERNS
Isolation Models: Virtual Machines vs Containers
Not which is better. What isolation each abstraction sacrifices or preserves. VMs provide hardware-level isolation through the hypervisor — the boundary is enforced in silicon scheduling and memory management. Containers share a kernel — the boundary is enforced by namespace and cgroup policy. Understanding what each boundary costs, and where each fails, is the prerequisite for placing workloads correctly in environments where both abstractions coexist.
Control Plane Inheritance
Why orchestration layers inherit virtualization assumptions. How abstraction boundaries become control plane authority boundaries. What changes — and what does not — when Kubernetes, a cloud scheduler, or an AI orchestration layer sits above the hypervisor. The mechanics from Cards 1–4 don’t stop mattering when you add an orchestration layer. They become the hidden constraints that orchestration systems amplify rather than resolve.
>_ STAGE GRADUATES CAN NOW
The Operational stage — Control Plane Architecture — picks up directly from the mechanics established here. The abstraction boundaries, scheduling behavior, and failure-domain vocabulary from Foundation are the inputs every control plane design problem begins with. Stage 2 applies those mechanics to cluster-wide orchestration authority, scheduling decisions, and lifecycle coordination — the operational consequences that emerge when many hypervisor hosts are governed simultaneously. Before moving forward, architects completing this stage should be able to:
- Reason about contention before deployment — not just after utilization alerts fire
- Identify failure-domain assumptions in an existing architecture and trace them back to the hypervisor layer that defined them
- Explain why control planes amplify scheduling behavior rather than abstract it away
- Separate abstraction convenience decisions from architectural determinism decisions
- Distinguish between an HA restart guarantee and an application recovery guarantee
- Describe what changes — and what does not — when an orchestration layer is placed above the virtualization layer
>_ SPECIALIZATION TRACKS
The Specialization Tracks branch from the Foundation stage because every specialization inherits the same execution mechanics underneath it. Foundation gives you the vocabulary; the Tracks give you depth in a specific discipline. Each track assumes Foundation-level fluency — the mechanics covered here are not re-explained inside the Tracks.
>_ Where Do You Go From Here
YOU’VE BUILT THE VOCABULARY.
NOW VALIDATE WHETHER YOUR ARCHITECTURE HOLDS.
Foundation-level architects moving toward platform selection or migration decisions often discover that the assumptions they’re designing around don’t survive contact with production. The Migration Readiness Assessment identifies the gaps before they become incidents.
VMware Migration Readiness Assessment
Vendor-agnostic review of your virtualization environment — failure domain mapping, platform assumptions, and migration readiness before you commit to an exit path.
- > Failure domain mapping and blast radius analysis
- > Abstraction assumption audit across current stack
- > Platform selection criteria and dependency mapping
- > Migration sequencing and risk prioritization
Architecture Playbooks. Field-Tested Blueprints.
Field-tested virtualization blueprints covering the failure modes Foundation architects encounter first — scheduling assumptions, HA gaps, and abstraction debt that compounds in production.
- > Hypervisor Scheduling & Contention Patterns
- > Failure Domain Mapping in Mixed Environments
- > HA vs Application Recovery: The Gap Architects Miss
- > Control Plane Inheritance in Post-VMware Architectures
Zero spam. Unsubscribe anytime.
>_ FREQUENTLY ASKED QUESTIONS
Q: What is the difference between a Type 1 and Type 2 hypervisor in enterprise architecture?
A: A Type 1 hypervisor runs directly on physical hardware — it is the first software layer the hardware executes, and it mediates all resource access for guest operating systems above it. A Type 2 hypervisor runs on top of a host operating system, which mediates hardware access on its behalf. The architectural consequence is direct: a Type 1 hypervisor controls the scheduling model, memory allocation, and failure domain boundaries for every guest workload. A Type 2 adds a host OS as an intermediary, which introduces latency, limits isolation guarantees, and adds a failure surface. Enterprise virtualization infrastructure is built on Type 1 hypervisors because the control plane authority, performance characteristics, and isolation properties required for production workloads cannot be reliably delivered through a Type 2 architecture.
Q: Why does NUMA topology matter at the virtualization layer?
A: NUMA — Non-Uniform Memory Access — describes a physical memory architecture where CPU access latency to memory depends on which NUMA node the memory resides on. When a virtual machine’s vCPUs are scheduled across physical cores that span two NUMA nodes, memory access for that VM becomes non-uniform: half its memory accesses are local-latency and half are remote-latency. The hypervisor scheduler can be configured to enforce NUMA locality — keeping vCPUs and their associated memory on the same NUMA node — but this constraint is only applied when it is explicitly configured. Environments that ignore NUMA topology at the VM placement layer discover the performance consequence at the application layer, typically as latency anomalies that are difficult to attribute because the virtualization layer is no longer a visible concern.
Q: What is a failure domain in virtualized infrastructure?
A: A failure domain is the set of components that fail together when a single failure event occurs. In virtualized infrastructure, the hypervisor host is the fundamental failure domain: if the host fails, every VM running on it fails simultaneously. The cluster is a larger failure domain: if the shared storage fabric fails, all VMs across the cluster that depend on that storage are affected. HA and DRS policies define recovery behavior within and across failure domains — but they do not redefine the domains themselves. The failure domain boundaries defined at the virtualization layer are inherited by every recovery architecture built above it. Architects who do not model failure domains explicitly at the hypervisor layer typically discover their boundaries during an incident rather than during design.
Q: When does VM isolation no longer provide sufficient workload separation?
A: VM isolation provides hardware-enforced memory and compute separation — one VM cannot access another’s memory space through the hypervisor abstraction under normal conditions. This isolation is sufficient for most workload separation requirements. It becomes insufficient when the threat model includes hypervisor-layer vulnerabilities (VM escape exploits), when regulatory requirements mandate physical host separation rather than logical isolation, or when workload characteristics require dedicated hardware resources that cannot be shared without performance interference. The distinction matters architecturally because teams that treat VM isolation as absolute often discover its limits at exactly the moment a security boundary is under pressure.
Q: What should architects understand about CPU scheduling before designing a virtualized workload?
A: The hypervisor CPU scheduler arbitrates access to physical CPU cores across all VMs on a host. Under normal load, each VM receives its requested vCPU allocation without significant queuing delay. Under contention — when aggregate vCPU demand exceeds physical core availability — the scheduler begins making priority decisions: some VMs receive their cycles immediately, others wait. The wait time is CPU ready time, and it is the contention signal architects should be designing against. Workloads with latency-sensitive characteristics — databases, real-time processing, financial services applications — must be sized and placed with contention behavior in mind, not idle behavior. The overcommit ratios that look safe at 30% utilization produce a different scheduling environment at 80%.
Q: Why do virtualization mechanics still matter in cloud-native infrastructure?
A: Kubernetes does not replace the virtualization layer — in most enterprise environments, it runs on top of it. The scheduling assumptions Kubernetes makes about node resources are directly shaped by the hypervisor behavior beneath the nodes. CPU ready time from a contended hypervisor scheduler appears to Kubernetes as node-level latency — the Kubernetes scheduler has no visibility into the cause. NUMA misalignment at the hypervisor layer produces memory bandwidth constraints that Kubernetes resource requests cannot model. Failure domains defined at the hypervisor layer become the blast radius boundaries that pod scheduling and replication policies operate within, often without the Kubernetes administrator knowing where those boundaries are. Virtualization mechanics matter in cloud-native infrastructure because they are the physical layer that cloud-native abstractions assume is deterministic — when that assumption breaks, the breakage appears two layers up.
>_ RELATED SYSTEMS
Parent architectural domain — the full pillar covering platform decision frameworks, hypervisor architecture, and operational models.
Open Pillar →Full Domain Path — all 5 maturity stages from Foundation through Sovereign. This page is Stage 01.
Open Domain Path →Next maturity transition — Operational Stage 02. Where the mechanics established in Foundation are applied to control plane design problems.
Open Stage →Next maturity transition — storage fabric and network architecture as new failure domains inside the control plane authority model established here.
Open Stage →Specialization Track — deep dive into execution mechanics. CPU scheduling depth, NUMA design, and compute sizing for virtualized workloads.
Open Track →Declarative control planes inherit virtualization assumptions — IaC state models depend on the failure-domain and scheduling vocabulary established at this layer.
Open Pillar →GPU scheduling and orchestration inherit hypervisor-level resource behavior — the scheduling physics from Foundation reappear at the GPU cluster layer.
Open Pillar →Guide to Security for Full Virtualization Technologies — foundational security reference for hypervisor architecture and VM isolation models.
Open Reference →Reference technical document for hypervisor CPU scheduling behavior — directly relevant to Card 02 scheduling mechanics.
Open Reference →