VIRTUALIZATION DETERMINISTIC OPERATIONS
Lifecycle governance, drift enforcement, and cost architecture — where virtualization platforms remain deterministic under operational constraint or decay into unmanaged entropy.
Virtualization deterministic operations separate platforms that survive long-term production from those that scale well on Day 1 but fail by Day 700. Determinism means: predictable upgrade behavior, quantified cost architecture, controlled configuration drift, and lifecycle governance that doesn’t destabilize the entangled topology established in Stage 3: Storage & Network Integration.
Most virtualization outages after Year 2 are not technical failures — they’re governance failures. Virtualization deterministic operations exist because Day-2 governance is where architectural decisions made in Stages 1–3 either remain enforceable or decay into unmanaged complexity.
| Stage | Core Concern |
|---|---|
| 1 — Foundation | Execution mechanics |
| 2 — Operational | Orchestration authority |
| 3 — Operational | Failure-domain coupling |
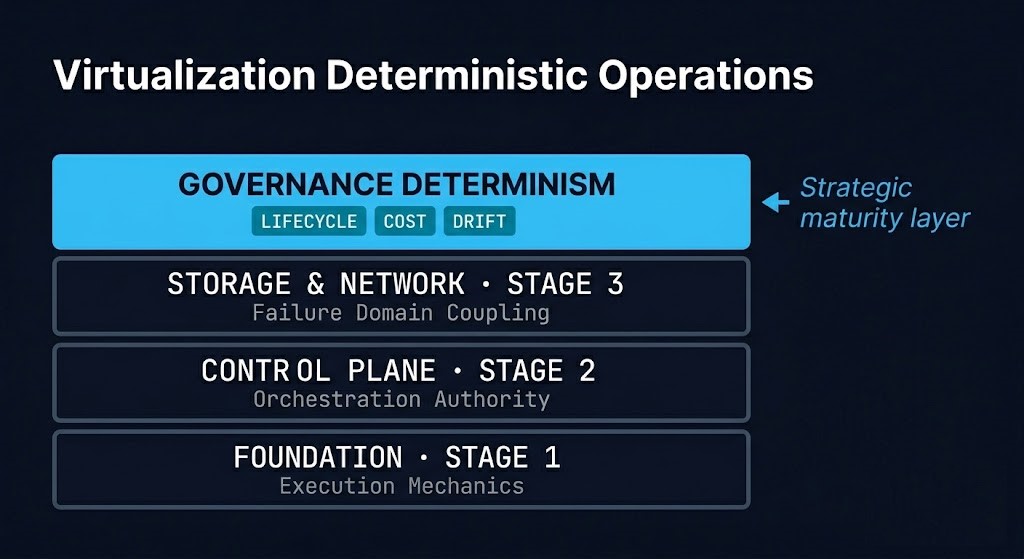
| 4 — Strategic | Governance determinism |
| 5 — Sovereign | Sovereign portability |
MATURITY STAGE POSITION
- Current Stage: Strategic — Maturity Stage 04 of 05
- Primary Architectural Concern: How lifecycle events (upgrades, patches, licensing changes, cost constraints) interact with the control plane authority and failure domain topology established in Stages 1–3 — and how governance prevents those interactions from destabilizing the platform
- Primary Failure Mode: Treating Day-2 operations as procedural tasks when they are architectural events. An upgrade is not a maintenance window — it’s a control plane state transition. A licensing change is not a cost adjustment — it’s an architectural constraint that forces density or redundancy changes. A patch is not a fix — it’s a drift vector that resets policies the architecture depends on
- Primary Governance Surface: Lifecycle sequencing, policy inheritance, cost constraints, and drift remediation across the control plane boundary established in Stage 2
- Stage Outcome: Architects completing virtualization deterministic operations can model lifecycle governance as a deterministic system, quantify cost architecture decisions before they force operational changes, detect configuration drift before it destabilizes production, and sequence upgrade/patch/capacity decisions around the platform’s actual dependencies rather than vendor schedules
- Next Stage: Sovereign — Post-VMware Strategic Architecture
Operational maturity (Stage 2: Control Plane Architecture and Stage 3: Storage & Network Integration) proves you can run the platform at scale under steady-state conditions. Strategic maturity (Stage 4) proves you can keep it running under the constraints that only appear after Year 1: cost pressures, licensing model changes, upgrade cycles that conflict with SLA commitments, patch management that introduces drift, and capacity planning decisions that force architectural trade-offs.
A cluster that loses quorum during a rolling upgrade failed because the upgrade sequence didn’t account for the quorum dependency. A licensing change that forces host consolidation failed because the cost model didn’t account for the failure domain coupling that consolidation breaks. A firmware patch that resets distributed switch policies failed because the drift detection system didn’t exist or wasn’t enforceable.
>_ WHY THIS STAGE EXISTS
Most virtualization outages blamed on “Day-2 operations” are actually governance failures. Virtualization deterministic operations addresses lifecycle events treated as maintenance windows when they are control plane state transitions, cost constraints that force architectural changes without modeling those changes, and configuration drift that accumulates for months until it destabilizes production.
This stage exists because every operational virtualization platform inherits a governance surface from how lifecycle, cost, and drift are managed. Stage 4 makes that surface explicit — names it, maps it, and treats Day-2 governance as the architectural discipline it actually is.
WHAT THIS STAGE IS NOT
01 — NOT A PATCH MANAGEMENT WALKTHROUGH
The architectural question is how patches interact with the control plane state and failure domain topology — not which patches to apply or how to stage a maintenance window. Patch governance is about dependency mapping, drift detection, and policy reset vectors — not patch deployment procedures.
02 — NOT A VMWARE LICENSING STRATEGY GUIDE
The focus is cost architecture — how licensing models (per-core, per-VM, subscription vs perpetual) force density changes, consolidation decisions, and architectural trade-offs that affect the failure domain topology established in Stage 3. Licensing is one input into cost architecture; it’s not the architectural concern itself.
03 — NOT AN UPGRADE CERTIFICATION TRACK
The concern is upgrade physics — how control plane state transitions during rolling upgrades, how quorum dependencies affect maintenance sequencing, and how upgrade-induced drift resets policies the platform depends on. Upgrade execution is procedural; upgrade physics is architectural.
04 — NOT A CAPACITY PLANNING SPREADSHEET
Capacity planning at the Strategic maturity level is about modeling how density changes, workload growth, and host additions affect the failure domain boundaries and cost architecture established in prior stages. It’s architectural constraint modeling, not resource forecasting.
>_ READING DEPTH
STRATEGIC STAGE — VIRTUALIZATION DETERMINISTIC OPERATIONS READING SCOPE
| Article | Architectural Focus | Est. Read | Pillar |
|---|---|---|---|
| VMware Licensing Costs: The Estimation Framework | Cost architecture, licensing footprint modeling, ghost cores, subscription economics | 12 min | Virtualization |
| VMware Core Calculator | Licensing footprint audit, core entitlement modeling, VVF vs VCF decision framework | Tool | Virtualization |
| Terraform Day-2 Operations Debt | Configuration drift, state divergence, lifecycle governance for declarative platforms | 14 min | Modern Infra & IaC |
| Infrastructure as a Software Asset | CI/CD for infrastructure, deterministic lifecycle management, drift as architecture decay | 13 min | Modern Infra & IaC |
>_ WHERE TO ENTER THIS STAGE
Start here if you completed Stage 3: Storage & Network Integration and are ready to move from failure domain topology (what the platform does under failure) to governance architecture (how to keep the platform deterministic as it evolves through lifecycle events, cost constraints, and operational drift).
You can likely skip ahead to Card 3 if:
- You have modeled how a major version upgrade (e.g., ESXi 7.x → 8.x, AOS 5.x → 6.x) affects control plane state and policy inheritance
- You have quantified the cost architecture of your platform — cost per VM, cost per core, cost per workload tier — and understand how those numbers force architectural decisions
- You have experienced configuration drift that destabilized production — not in a vendor postmortem, but in your own environment — and built the detection/remediation system that prevents recurrence
If those three statements describe you, Card 3 (Operational Determinism & Drift Detection) is the correct entry point. If any of them require translation, start at Card 1 — Lifecycle Governance & Upgrade Physics.
>_ ARCHITECTURE MATURITY POSITION
| Stage | Level | Focus | Slug |
|---|---|---|---|
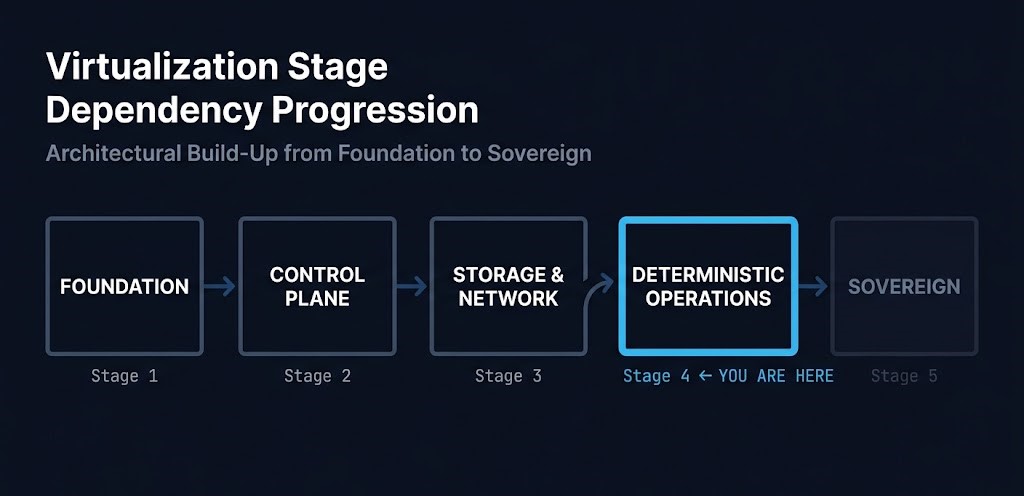
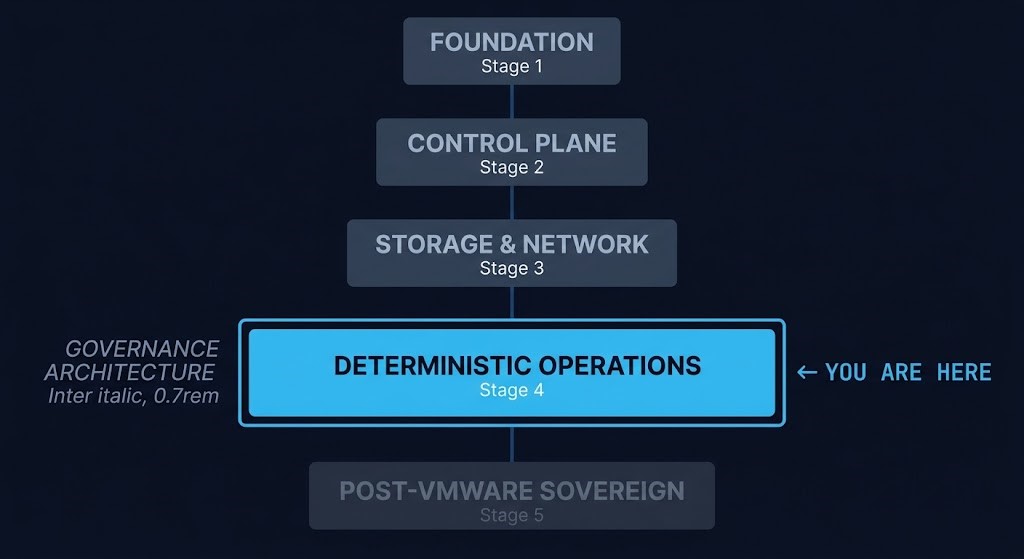
| 01 — Virtualization Foundations | Foundation | Abstraction mechanics, scheduling physics, failure-domain vocabulary, control plane inheritance | /virtualization-foundations/ |
| 02 — Control Plane Architecture | Operational | Cluster coordination, scheduling authority, lifecycle governance, platform authority models | /virtualization-control-plane-architecture/ |
| 03 — Storage & Network Integration | Operational | Storage fabric, distributed switching, failure domain coupling, infrastructure entanglement | /virtualization-storage-and-network-architecture/ |
| 04 — Deterministic Operations ← YOU ARE HERE | Strategic | Lifecycle governance, drift enforcement, cost architecture, operational determinism | /virtualization-deterministic-operations/ |
| 05 — Post-VMware Strategic Architecture | Sovereign | Platform independence, migration authority, exit strategy | /virtualization-sovereign-architecture/ |
>_ READING SEQUENCE
The five cards below are dependency-ordered. Each card assumes the prior card’s concepts are understood. If you’re entering mid-sequence, review the dependencies listed at the start of each card.
Lifecycle Governance & Upgrade Physics
Virtualization deterministic operations begins with lifecycle governance. Virtualization platforms are stateful distributed systems. Every upgrade, patch, or firmware update is a control plane state transition — not a maintenance event. Upgrade physics is the study of how those transitions affect quorum, scheduling authority, policy inheritance, and the failure domain topology the platform depends on. Rolling upgrades aren’t “safe” by default — they’re safe when the upgrade sequence accounts for the platform’s actual dependencies. vCenter upgrades affect cluster-wide DRS and HA behavior. ESXi host upgrades reset distributed switch policies unless explicitly preserved. AOS upgrades on Nutanix trigger CVM restarts that affect data locality. Firmware updates can reset BIOS settings that control CPU pinning or NUMA affinity. The architectural question is not “how do we upgrade” — it’s “what does the upgrade break, and how do we detect/remediate it before production workloads experience the breakage?”
Cost Architecture & Licensing Economics
Cost architecture is the discipline of modeling how licensing models, subscription economics, and capacity planning decisions force architectural changes — density consolidation, host additions, workload tier restructuring — that affect the failure domain topology and control plane authority established in prior stages. Broadcom’s per-core licensing model didn’t just change VMware’s pricing — it changed the architectural constraints. A dual-socket 12-core host is billed as 32 cores (16-core floor per socket). That 8-core gap per host — “ghost cores” — generates cost with no workload behind it. In a 10-host cluster, that’s 80 ghost cores on the invoice before any VMs are counted. The architectural consequence: licensing now forces density decisions (consolidate workloads to reduce ghost cores) that affect failure isolation, DRS behavior, and HA survivability. Cost per VM, cost per core, cost per workload tier — these are not accounting metrics. They are architectural signals that tell you whether your platform’s cost structure reflects efficient design or inefficient entanglement.
Operational Determinism & Drift Detection
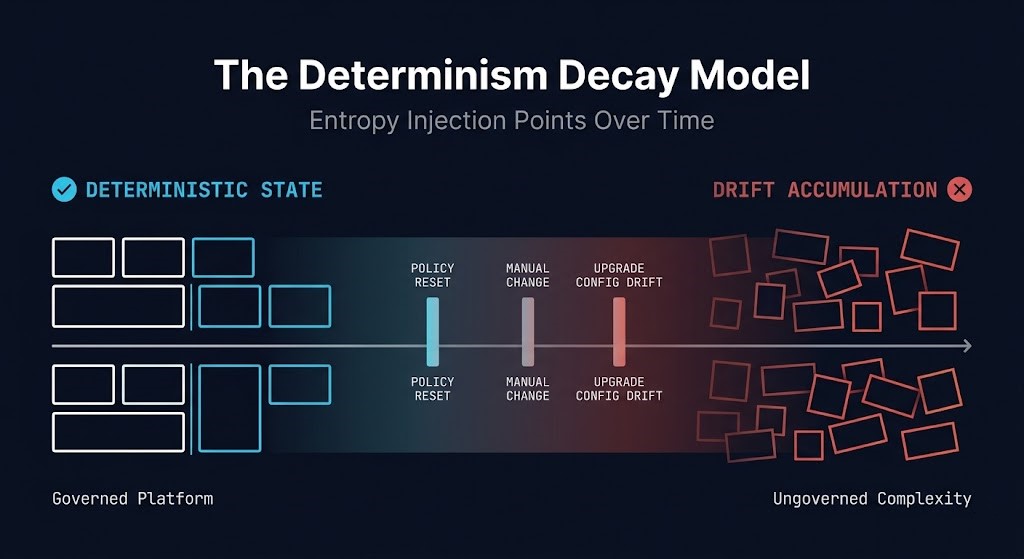
This is the card virtualization deterministic operations exists to deliver. Lifecycle governance and cost architecture each define constraints that affect platform behavior. Operational determinism is the architectural condition where those constraints remain enforceable over time — where drift is detected before it destabilizes production, where policy resets are remediated automatically, where configuration changes flow through a governable control surface instead of accumulating as undocumented mutations.
At Strategic maturity, governance authority becomes as important as orchestration authority. The platform is no longer defined solely by who schedules workloads (Stage 2: Control Plane Architecture) — it is defined by who can enforce state integrity after the platform begins drifting from declared intent. Whoever controls drift remediation controls platform authority.
Virtualization deterministic operations is where Day-2 operations becomes infrastructure governance architecture — lifecycle, cost, and drift stop being operational tasks and start being architectural dependencies the platform inherits. Configuration drift is not a cosmetic problem. It is architecture decay. A distributed switch policy reset during a firmware update is drift. A DRS affinity rule that disappears during a vCenter upgrade is drift. A storage policy that defaults back to RAID-1 after a host replacement is drift. Each one reduces determinism — the platform’s behavior becomes less predictable, less governable, and less resilient under failure.
Capacity Planning as Architectural Constraint Modeling
Capacity planning in virtualization deterministic operations is not resource forecasting — it’s architectural constraint modeling. Every capacity decision (add hosts, consolidate workloads, expand storage, increase density) affects the failure domain boundaries and cost economics established in prior stages. Adding hosts to a cluster doesn’t just add capacity — it increases the failure domain surface (more hosts = more potential failure points), changes DRS balancing behavior (workload distribution across a larger pool), and affects licensing footprint (more cores = higher subscription cost under per-core models). Consolidating workloads to reduce cost doesn’t just reduce spend — it increases density, which increases blast radius (more VMs per host = larger impact when a host fails), reduces scheduling flexibility (fewer evacuation targets during maintenance), and can trigger resource contention under load. The architectural question is not “do we have enough capacity” — it’s “how does this capacity change affect the platform’s failure isolation, control plane authority, and cost structure?”
Governance Portability & Platform Independence
The governance architecture built in Stage 4 — lifecycle control, cost determinism, drift detection, capacity constraint modeling — is the foundation that makes platform independence possible. Virtualization deterministic operations proves you can govern the platform over time. Sovereign maturity (Stage 5: Post-VMware Strategic Architecture) proves you can govern the platform’s exit strategy — migrate workloads, translate policies, preserve operational determinism across hypervisor boundaries. Workload migration is procedural portability — moving VMs from one hypervisor to another. Sovereign architecture (Stage 5) requires governance portability — the ability to preserve lifecycle control, drift enforcement, policy inheritance, and operational determinism after the platform boundary changes. Most organizations can migrate workloads. Very few can migrate governance. The exit decision (VMware → Nutanix, VMware → Proxmox, VMware → Kubernetes) is not a licensing decision or a cost decision — it’s a governance decision. Can you preserve the lifecycle control, cost architecture, and drift detection systems you built in Stage 4 when the underlying platform changes? Or does the platform change force you to rebuild governance from scratch? Stage 4 ends here because every sovereign architecture decision (Stage 5) assumes the deterministic governance established here is portable.
DETERMINISTIC OPERATIONS FAILURE PATTERNS
— Lifecycle Governance Failures —
— Cost Architecture & Drift Failures —
>_ STAGE GRADUATES CAN NOW
You can now govern at scale. Stage 3: Storage & Network Integration established the failure domain topology — how storage, networking, and orchestration couple under the control plane. Virtualization deterministic operations establishes how to keep that topology deterministic as the platform evolves through lifecycle events, cost constraints, and operational drift. What Sovereign maturity adds (Stage 5: Post-VMware Strategic Architecture) is platform portability — the ability to preserve this governance architecture when the underlying hypervisor or orchestration layer changes.
- Model virtualization lifecycle events (upgrades, patches, firmware updates) as control plane state transitions rather than maintenance windows — and predict how those transitions affect policy inheritance, quorum, and failure domain boundaries
- Quantify cost architecture decisions before they force operational changes — cost per VM, cost per core, cost per workload tier — and understand how licensing models force density, consolidation, or host addition decisions that affect resilience
- Detect configuration drift before production workloads experience instability — through automated drift detection pipelines, GitOps workflows, or CI/CD enforcement for infrastructure state
- Sequence capacity planning decisions around architectural constraints — modeling how host additions, workload consolidation, or density increases affect failure isolation, cost structure, and control plane behavior
>_ SPECIALIZATION TRACKS
The Specialization Tracks below give depth in the specific disciplines Stage 4 governs. Where Stage 4 establishes that lifecycle, cost, and drift are governance concerns under the control plane, the Tracks treat each discipline as a deep-dive architecture sequence.
>_ Where Do You Go From Here
YOU’VE MODELED THE GOVERNANCE.
NOW AUDIT WHETHER YOUR ENVIRONMENT HOLDS.
Strategic maturity demands lifecycle control, drift detection, and cost architecture modeling. The Migration Readiness Assessment audits whether your governance systems can survive a platform transition.
Migration Readiness Assessment
Lifecycle governance mapping, cost architecture review, and drift detection system design for virtualization platforms under operational constraint.
- > Upgrade sequencing analysis
- > Cost architecture audit
- > Policy drift detection review
- > Capacity constraint modeling
Architecture Playbooks. Field-Tested Blueprints.
Field-tested blueprints for upgrade sequencing, cost modeling frameworks, drift detection pipelines, and capacity constraint analysis.
- > Upgrade physics modeling
- > Ghost cores audit templates
- > GitOps drift detection
- > Capacity boundary mapping
Zero spam. Unsubscribe anytime.
>_ FREQUENTLY ASKED QUESTIONS
Q: What does “operational determinism” mean in virtualization architecture?
A: Operational determinism is the architectural condition where platform behavior remains predictable and governable over time — where lifecycle events (upgrades, patches, capacity changes) don’t introduce drift, where cost constraints don’t force unplanned architectural degradation, and where configuration changes flow through a control surface that can detect/remediate deviations before production workloads experience them. At the Strategic maturity level, determinism is what separates platforms that survive long-term production from those that decay into unmanaged complexity.
Q: Why is lifecycle governance framed as control plane state transitions rather than maintenance windows?
A: Because maintenance windows are procedural — they describe when something happens. Control plane state transitions are architectural — they describe what changes when the maintenance happens and what dependencies that change affects. An ESXi upgrade is not “take host offline, apply patch, reboot” — it’s “transition host from scheduling pool → maintenance mode → upgrade → policy inheritance reset → rejoin scheduling pool.” Each transition affects DRS, HA, distributed switching, and storage policies. Governance at the Strategic maturity level requires modeling those transitions, not just scheduling the window.
Q: How is cost architecture different from cost optimization?
A: Cost optimization treats cost as a variable to reduce. Cost architecture treats cost as a constraint that forces architectural decisions. Consolidating workloads to reduce licensing cost is optimization. Understanding that consolidation increases blast radius, reduces scheduling flexibility, and changes the failure domain boundaries established in Stage 3 is architecture. Cost architecture models how cost constraints force trade-offs that affect platform resilience, control plane behavior, and operational determinism.
Q: What is configuration drift at the Strategic maturity level?
A: Configuration drift is architecture decay — the gradual divergence between the platform’s documented state and its actual runtime state. A distributed switch policy reset during a firmware update is drift. A DRS affinity rule that disappears during a vCenter upgrade is drift. A manual firewall rule added during an incident and never removed is drift. Each reduces determinism. Drift at the Strategic maturity level is not a cosmetic problem — it’s a governance failure that destabilizes the failure domain topology and control plane authority established in prior stages.
Q: Why is capacity planning called “architectural constraint modeling” in this stage?
domain boundaries, cost economics, and control plane behavior established in Stages 2–3. Adding hosts increases failure surface. Consolidation increases blast radius. Density changes affect DRS balancing and HA survivability. The architectural question is not “do we have enough capacity” — it’s “how does this capacity change affect the platform’s resilience, cost structure, and governance?”
Q: Why do virtualization platforms become unstable after upgrades?
A: Most post-upgrade instability is not caused by the upgrade itself — it’s caused by policy inheritance failures, control plane state transitions that weren’t modeled, or pre-existing drift that the upgrade amplified. An ESXi host upgrade resets distributed switch policies unless explicitly preserved. A vCenter upgrade temporarily disables DRS and HA during the state transition. A Nutanix AOS upgrade triggers CVM restarts that affect data locality. Upgrades are control plane state transitions, not maintenance windows. Platforms become unstable after upgrades when the upgrade sequence doesn’t account for the platform’s actual dependencies — quorum, policy inheritance, drift remediation, and control plane authority boundaries.
Q: How does Stage 4 prepare for Stage 5 (Sovereign)?
A: Strategic maturity (Stage 4) establishes governance architecture — lifecycle control, cost determinism, drift detection systems. Sovereign maturity (Stage 5: Post-VMware Strategic Architecture) proves that governance architecture is portable across platform boundaries. The exit decision (VMware → Nutanix, VMware → Proxmox, VMware → Kubernetes) is fundamentally a governance question: can you preserve the deterministic lifecycle control, cost architecture, and drift detection built in Stage 4 when the underlying platform changes? Stage 4 is the prerequisite because you cannot govern platform independence if you haven’t first proven you can govern the platform itself.
>_ RELATED SYSTEMS
The platform discipline that governs hypervisor authority, resource scheduling, and workload resilience.
Open Pillar →The five-stage maturity sequence for virtualization platform governance from Foundation to Sovereign.
Open Domain Path →The operational foundation Stage 4 governs — how storage fabric and distributed switching couple to create failure domain topology.
Open Stage →The Sovereign maturity transition — platform independence, migration authority, and governance portability after the hypervisor boundary changes.
Open Stage →Recovery architecture inherits governance determinism — backup fidelity and immutable storage depend on drift detection and lifecycle control.
Open Domain Path →Infrastructure as Code is deterministic governance at scale — Terraform drift detection, GitOps control planes, and declarative state enforcement.
Open Domain Path →GPU fabric lifecycle governance, AI training pipeline determinism, and inference platform cost architecture inherit virtualization governance patterns.
Open Domain Path →VMware’s upgrade automation framework — reference documentation for modeling vCenter, ESXi, and vSAN upgrade state transitions.
Open Reference →Nutanix LCM reference — AOS upgrade pre-checks, CVM sequencing, and drift validation before automated lifecycle operations.
Open Reference →