RUNTIME & CLUSTER ORCHESTRATION
Capacity does not determine execution. Authority determines execution.
MATURITY POSITION — AI INFRASTRUCTURE STAGE 04 OF 07
- Current Stage: Strategic — Maturity Stage 04 of 07
- Primary Architectural Concern: How execution authority is expressed through schedulers, quotas, placement policies, and topology constraints across heterogeneous AI clusters — and how the authority model determines where workloads are permitted to execute, not merely where capacity exists
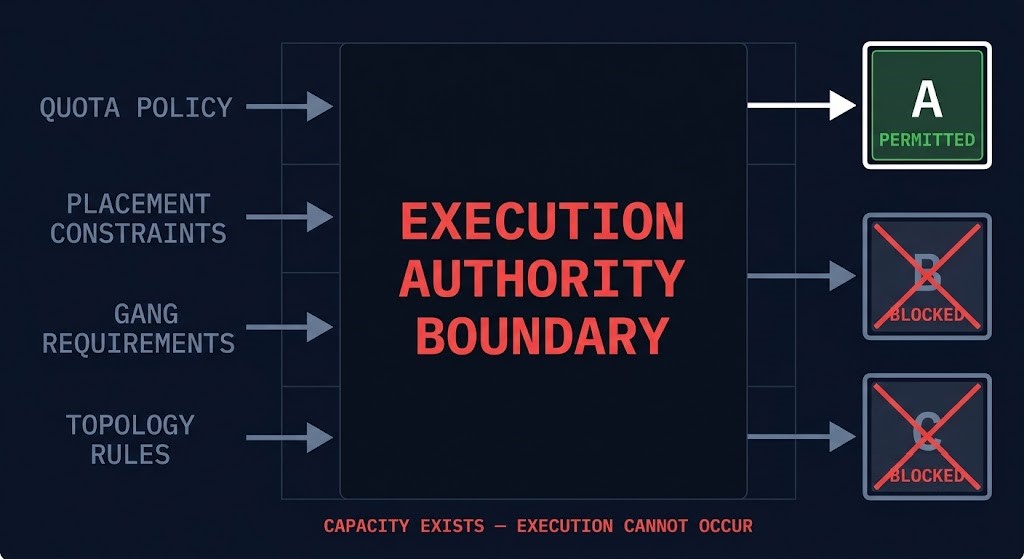
- Primary Failure Mode: Authority-Blind Orchestration — cluster designs that assume workloads execute wherever capacity exists, while ignoring the policies, constraints, and authority structures that determine where execution is permitted. Capacity exists, but execution cannot occur because authority constraints, quota policy, topology restrictions, or scheduling rules prevent placement.
- Stage Outcome: Ability to identify the Execution Authority Boundary (#119) and design scheduler policy, quota enforcement, gang scheduling, and multi-tenant isolation architectures that govern execution rather than merely dispatching it
- Next Stage: Operations & LLMOps Architecture →
Runtime cluster orchestration is the stage where AI infrastructure decisions stop being about resource availability and start being about execution authority. The central question of this stage is not whether capacity exists — it is who is permitted to consume it, under what constraints, and in what order. That shift from capacity management to authority governance is what defines Strategic maturity in the AI infrastructure path.
A3 established where execution can occur efficiently — data locality, storage throughput, and checkpoint architecture determine whether the data pipeline can sustain the execution layer. A4 establishes whether execution is allowed to occur at all. Locality constraints tell you where data lives. Authority constraints tell you whether the scheduler has permission to run the job there. These are architecturally distinct problems, and conflating them is one of the most common sources of misdiagnosed cluster failures.
The articles in this stage treat the scheduler as an enforcement mechanism, not a decision-maker. Scheduling decisions are already made — by quota policy, placement rules, topology constraints, gang scheduling requirements, and tenancy isolation architecture. The scheduler’s role is to express those decisions. Clusters that skip the authority model and rely on default scheduler behavior produce environments where capacity metrics look healthy while execution fails silently.
WHY THIS STAGE EXISTS — AUTHORITY-BLIND ORCHESTRATION
Capacity does not determine execution. Authority determines execution. Once clusters become multi-tenant, topology-aware, and policy-governed, the critical architectural question shifts from “Do resources exist?” to “Who is permitted to consume them, under what constraints, and in what order?”
Most AI cluster failures at this layer share a common origin: Authority-Blind Orchestration. Compute is provisioned. Fabric is sized. Storage is modeled. Then the scheduler is configured against default behavior with no explicit authority model — no quota hierarchy, no topology constraints, no gang scheduling policy, no multi-tenant isolation design. The result is a cluster that behaves unpredictably under load, fragments GPU capacity without explanation, and produces queue starvation that capacity metrics cannot diagnose.
The symptoms are consistent: jobs queued behind available capacity, GPU fragmentation that resists bin-packing, gang scheduling deadlocks under multi-tenant load, and preemption cascades that affect tenants who never crossed their quota. None of these are capacity problems. They are authority model failures — and they cannot be resolved by adding nodes.
Stage Anchor Question
Who decides where execution occurs?
Execution authority is expressed through the aggregate of scheduler policy, quota enforcement, topology constraints, gang scheduling requirements, placement rules, and tenancy isolation. Once the Execution Authority Boundary (#119) is established — the point at which workload placement is no longer determined by available capacity but by the authority model governing execution — capacity becomes a necessary condition for execution, not a sufficient one.
What This Stage Is Not
Not a Kubernetes operations guide. This stage does not cover cluster administration, node maintenance, upgrade procedures, or monitoring dashboards. It covers the authority model that governs execution — how placement decisions are encoded in policy, quota, topology constraints, and gang scheduling rules, and what happens when that model is absent or incomplete.
Not a scheduler vendor comparison. Volcano, Kueue, and Yunikorn appear throughout this stage as architectural options with specific tradeoffs under specific workload conditions — not as products to be ranked. The authority model is the architecture. The scheduler is the enforcement mechanism. Selecting a scheduler before designing the authority model is an order-of-operations failure.
Not single-node GPU optimization. Per-GPU performance tuning, CUDA configuration, memory bandwidth optimization, and accelerator-level efficiency belong to A1 — Accelerated Compute Architecture. This stage assumes that individual accelerators are correctly configured and addresses how authority models govern their allocation across multi-node, multi-tenant cluster environments.
Not LLMOps operational runbooks. Model lifecycle management, deployment pipelines, version governance, and inference service operations belong to A5 — Operations & LLMOps Architecture. This stage establishes the execution authority model that A5’s operational layer inherits. Architects who skip A4 will encounter LLMOps governance problems that trace back to an undefined authority boundary.
>_ Estimated Reading Depth
| Format | Count | Estimated Time | Notes |
|---|---|---|---|
| Architecture articles | 11 | ~5 hrs | Core reading sequence — all five clusters |
| Total stage depth | 11 | ~4–6 hrs | Complete before proceeding to A5 Operations & LLMOps Architecture |
>_ Where to Enter This Stage
This stage is the right entry point if you are designing or evaluating AI cluster infrastructure where execution governance — not raw scheduling throughput — is the architectural concern. Specifically, enter here if:
- Jobs are queued behind capacity that metrics show as available — the scheduler is not placing workloads that should be schedulable
- Your cluster has no explicit quota hierarchy, and resource contention between tenants is resolved by default scheduler behavior
- Gang scheduling is configured but you have not modeled the preemption cost under multi-tenant load
- Placement decisions are made by affinity rules without a governing topology model — NVLink domain boundaries are not encoded in scheduling policy
- Your multi-tenant cluster has namespace isolation but no enforcement model connecting namespace boundaries to execution authority
Do not enter this stage expecting to resolve data pipeline starvation, storage wall encounters, or checkpoint architecture problems — those belong to A3. The authority model operates within the locality and throughput constraints A3 established. If execution is stalling because data delivery cannot keep pace, the constraint is upstream.
>_ Architecture Maturity Position
| Stage | Name | Maturity Level | Stage Question |
|---|---|---|---|
| A1 | Accelerated Compute Architecture | Foundation | What does an accelerator actually execute? |
| A2 | Fabric Architecture | Operational | What constrains execution movement? |
| A3 | Storage & Data Pipeline Architecture | Operational | What constrains data movement? |
| A4 ← YOU ARE HERE | Runtime & Cluster Orchestration | Strategic | Who decides where execution occurs? |
| A5 | Operations & LLMOps Architecture | Strategic | How is model lifecycle governed operationally? |
| A6 | Governance & Runtime Control | Strategic | Who owns runtime authority? |
| A7 | System Survivability Architecture | Resilient | What degrades gracefully and what collapses? |

>_ Stage Reading Sequence
The sequence below is organized by architectural problem cluster. Each cluster answers: what becomes architecturally unstable if this discipline is misunderstood?
Architectural question: What determines where a workload is permitted to execute?
What determines where a workload is permitted to execute?
Gang scheduling, topology-aware placement, and node affinity are not optimization hints — they are authority expressions. This cluster covers how placement decisions are encoded in scheduling policy, why GPU scheduling in Kubernetes requires architectural decisions that precede scheduler configuration, and how fragmentation emerges from clusters where placement authority was never formally defined. The third article maps the specific failure mode where a cluster appears to have available capacity while the scheduler cannot place any workload — the canonical Authority-Blind Orchestration signal.
Architectural question: What happens when execution authority conflicts at queue depth?
What happens when execution authority conflicts at queue depth?
Priority classes are not quality-of-service labels — they are authority hierarchies. Resource requests and limits define the scheduler’s guarantee model, not the actual execution model. This cluster covers how authority conflicts surface as preemption cascades, queue starvation, and runtime limit violations — and how FinOps governance failure in AI clusters is, at root, an authority model failure: no one defined who owns execution rights at scale.
Architectural question: How does execution authority propagate across multi-node job topologies?
How does execution authority propagate across multi-node job topologies?
Gang scheduling is the mechanism by which execution authority extends across multiple nodes simultaneously — all-or-nothing allocation as an architectural requirement, not a preference. These two articles cover the hardware stack decisions that establish the multi-node execution model, and the inference routing problem that emerges when placement authority has not been defined for distributed inference workloads. The authority model for multi-node jobs is more complex than single-node placement: NVLink domain boundaries, MPI topology requirements, and communication-aware scheduling all constrain where execution is permitted.
Architectural question: What happens to the authority model when partial failure occurs?
What happens to the authority model when partial failure occurs?
An authority model that works under normal load is not an authority model — it is a scheduling preference. This cluster covers what happens when partial failure exposes gaps in the authority structure: Day-2 incidents that trace to undefined behavior at failure boundaries, and the drift mechanism by which authority models degrade without visible cluster failure. Autonomous systems and complex orchestration environments share the same failure mode: authority continuity was never formally designed, so partial failures produce undefined execution states rather than graceful degradation.
Architectural question: How is execution authority enforced across tenants and namespaces?
How is execution authority enforced across tenants and namespaces?
Namespace isolation is a boundary, not an authority model. Quota enforcement is a mechanism, not a governance architecture. This cluster covers the execution governance layer: how Kubernetes fails as an LLM security boundary when the authority model is incomplete, and how the control plane boundary itself shifts as clusters scale — the point at which cluster-internal authority models become insufficient for the workloads they govern. Both articles bridge A4 into A6 by establishing where execution authority ends and runtime governance begins.
>_ Runtime & Cluster Orchestration Failure Patterns
>_ Stage Graduates Can Now
Completing this stage establishes execution authority as a first-class architectural concern in AI cluster design. A1 graduates understand compute. A2 graduates understand movement. A3 graduates understand data. A4 graduates understand authority. Earlier stages defined the physical constraints — accelerator boundaries, fabric limits, storage walls. This stage defines the enforcement model that operates within those constraints and determines whether execution is permitted at all. What Strategic maturity at A5 adds is the operational layer that runs within the authority model this stage establishes.
- Design gang scheduling policy that accounts for topology requirements and preemption cost before cluster provisioning — authority model first, scheduler configuration second
- Define execution authority hierarchies — quota structure, priority classes, placement constraints — as architectural decisions that precede workload onboarding
- Identify Authority-Blind Orchestration in existing clusters by mapping where execution failure traces to policy gaps rather than capacity shortfalls
- Enforce multi-tenant execution isolation without creating quota contention or preemption cascades that collapse legitimate workloads across tenant boundaries
- Propagate the Execution Authority Boundary forward into A5 and A6 — the LLMOps operational layer and the governance and runtime control stage both inherit the authority model established here; undefined authority at A4 compounds into governance failures at A6
No Specialization Tracks currently exist for the AI Infrastructure Architecture Path. Tracks are built after all seven maturity stages are live. This section will be populated as the path matures.
>_ Where Do You Go From Here
YOU’VE READ THE ARCHITECTURE.
NOW TEST WHETHER YOUR ENVIRONMENT HOLDS.
The Execution Authority Boundary is a design decision, not a monitoring alert. Identifying whether your cluster has a coherent authority model requires reviewing placement policy, quota hierarchy, gang scheduling configuration, and multi-tenant isolation architecture against your actual workload profile — before execution failures produce queue starvation that capacity tools cannot diagnose.
Infrastructure Architecture Review
A structured review of your AI cluster orchestration architecture against the authority model this stage covers. Delivered as a written assessment with findings and remediation sequencing.
- > Placement policy assessment — quota hierarchy, priority class design, authority model completeness
- > GPU fragmentation analysis — topology constraints vs. available capacity
- > Gang scheduling viability review — deadlock risk under current preemption policy
- > Multi-tenant execution governance assessment — isolation architecture and quota enforcement
Architecture Playbooks. Field-Tested Blueprints.
Field-tested blueprints for AI cluster orchestration and execution governance — covering the failure modes this stage introduces.
- > Execution Authority Boundary identification and policy design
- > GPU fragmentation diagnosis and topology-aware placement
- > Gang scheduling architecture for multi-tenant AI clusters
- > Multi-tenant quota enforcement and preemption policy design
Zero spam. Unsubscribe anytime.
>_ Frequently Asked Questions
Q: What is the Execution Authority Boundary?
A: The Execution Authority Boundary is the point at which workload placement is no longer determined by available capacity but by the authority model governing execution — the aggregate of scheduler policy, quota enforcement, topology constraints, gang scheduling requirements, placement rules, and tenancy isolation that determines where execution is permitted, not merely where capacity exists. Once the boundary is established, capacity becomes a necessary condition for execution, not a sufficient one.
Q: What is Authority-Blind Orchestration?
A: Authority-Blind Orchestration is the failure mode where cluster infrastructure is provisioned and schedulers are configured without establishing an explicit authority model. The cluster assumes workloads execute wherever capacity exists. The result is GPU fragmentation, queue starvation, gang scheduling deadlock, and preemption cascades that appear to be capacity problems but are governance failures. Adding nodes does not resolve Authority-Blind Orchestration — it compounds it.
Q: What is gang scheduling and why does it require an explicit authority model?
A: Gang scheduling is the mechanism by which all pods in a multi-node job are scheduled simultaneously — all-or-nothing allocation. It is required for distributed training workloads where partial allocation produces deadlock: each job holds some resources while waiting for the rest, and no job can proceed. Gang scheduling requires an explicit authority model because the all-or-nothing requirement directly conflicts with standard bin-packing behavior. Without a defined preemption policy and priority hierarchy, gang scheduling environments collapse into permanent deadlock under multi-tenant load.
Q: How does topology-aware scheduling differ from standard bin-packing?
A: Standard bin-packing places workloads wherever capacity exists, optimizing for utilization. Topology-aware scheduling places workloads where the interconnect topology — NVLink domains, PCIe lanes, NUMA boundaries — matches the communication requirements of the workload. For GPU-intensive distributed training, bin-packing can place nodes with available capacity across topology boundaries that collapse communication throughput at runtime. Topology-aware scheduling encodes the interconnect model as a placement authority constraint, not a preference.
Q: How does A3’s data locality model constrain A4 scheduler design?
A: A3 establishes where data must live for execution to remain viable — the storage locality commitments that prevent Data Availability Boundary violations. Those locality commitments become placement constraints at A4. If training data is co-located with specific storage nodes, the scheduler cannot place workloads freely across the cluster without violating the locality model A3 established. A3 defines the upstream physical constraints. A4’s authority model must be designed within those constraints, not independently of them.
Q: What does multi-tenant execution governance actually require architecturally?
A: Multi-tenant execution governance requires four distinct architectural layers: a quota hierarchy that defines resource ownership per tenant, a priority class model that defines the authority ordering when tenants compete for the same resources, a topology isolation model that prevents workloads from one tenant affecting the communication performance of another, and a preemption policy that specifies what happens when a higher-priority tenant requires resources currently held by a lower-priority one. Namespace isolation alone provides boundary separation — it does not provide execution governance.
Q: When does preemption become architecturally dangerous?
A: Preemption becomes architecturally dangerous when the preemption policy is undefined or when priority classes are not designed as a coherent authority hierarchy. Specifically: when lower-priority jobs hold gang-allocated resources and preemption of a single pod collapses the entire gang; when preemption cascades across tenant boundaries because priority classes were assigned without modeling cross-tenant contention; and when preemption frequency exceeds the checkpoint architecture’s recovery capability, producing net-negative execution throughput. Preemption is a governance tool — without an explicit authority model, it is an instability mechanism.
>_ Related Systems
Defines data movement constraints consumed by placement decisions — the locality commitments that A4’s scheduler authority model must operate within. A3 established where execution can occur efficiently. A4 establishes whether execution is allowed to occur at all.
Open Stage →Defines execution movement constraints consumed by scheduler topology policy — the Execution Locality Boundary (#116) established at A2 determines which node placements are physically viable for communication-intensive workloads.
Open Stage →Inherits the execution authority model established at A4 — model lifecycle governance, deployment pipelines, and inference service operations all operate within the placement and quota boundaries this stage defined.
Open Stage →A4 creates execution authority. A6 governs it — runtime control architecture, policy enforcement at the governance layer, and ownership of authority when cluster scale exceeds what scheduler policy alone can manage.
Open Stage →The full AI infrastructure pillar — cluster orchestration and execution governance in the context of the wider AI infrastructure decision landscape.
Open Pillar →The Kubernetes scheduler framework — extension points, scheduling profiles, and the plugin architecture that underlies topology-aware and gang scheduling implementations.
Open Reference →Gang scheduling and batch workload management for Kubernetes — the open-source scheduler that implements the authority model concepts this stage covers for AI and HPC workloads.
Open Reference →